Hand controlled Wi-Fi car
A car controlled based on hand gestures
Author: Popa Bogdan-Florin
GitHub Project Link: https://github.com/UPB-PMRust-Students/proiect-BogdanPopa123
Description
A device that acts as a UDP server and waits for another device to send commands to the first one. Based on the command, the car will move accordingly
-
The system utilizes a gyroscope to detect the inclination which orders the command
-
A motor controller to control the motors
-
The commands are sent via Wi-Fi
-
The gyroscope will send its params to the UDP server (the car) via Wi-Fi, and according to that it will action the motor controller
Motivation
This project represents the perfect opportunity for me to step into the embedded world, while also learning a new programming language, Rust, highly praised for its speed and safety.
I ve always been pasionate about techology. As a kid I always wondered about how toys are made, especially remote control cars. This project also helps me have a better understanding of computer networks.
Architecture
-
2 x Raspberry Pi Pico 2W 2350 - the microcontrollers of the project, serving as the "brains" of the project
-
L298N motor driver - the units that commands the two motors
-
2 x motor - does the moving
-
2 x Wi-Fi chip - responsable for the communication between the two devices
Log
Week - May
Week - May
Week - May
Hardware
- Raspberry Pi Pico 2W:
- Purpose: Controls all components.
- Function: Acts as the main controller, controlling all other modules
- Motors:
- Purpose: Helps the car move.
- Function: Used to move the car.
- L298N motor controller:
- Purpose: Controls the motors.
- Function: Serves as the controller of the motors, dictating their speed and rotation
- MPU-6500:
- Purpose: Gyroscope and accelerometer.
- Function: Measures the acceleration and incline on all 3 axes.
Hardware Overview:
- The Raspberry Pi Pico controls and coordinates all components.
- The motors are used to move the car.
- The MPU-6500 Measures the acceleration and incline on all 3 axes
- The L298 Serves as the controller of the motors, dictating their speed and rotation
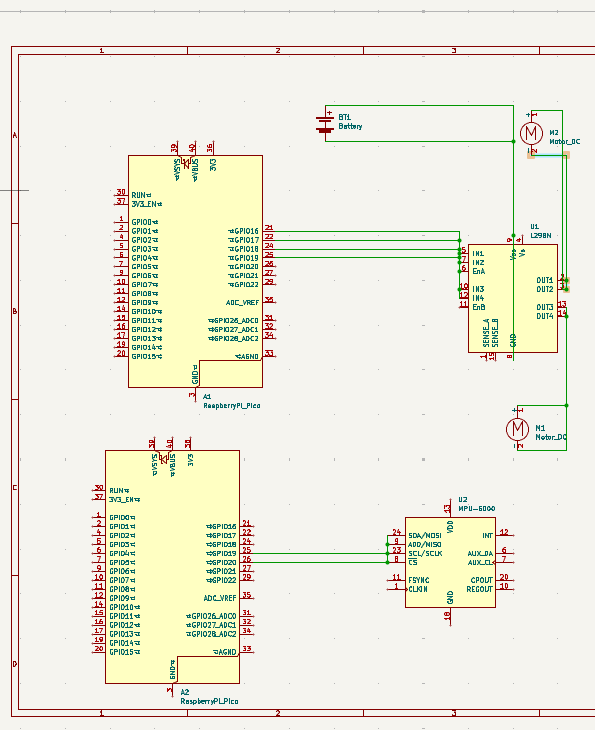
Schematics
Bill of Materials
| Device | Usage | Price |
|---|---|---|
| Rapspberry Pi Pico 2W | The microcontroller | 40 RON |
| L298 | Colour Sensor | 11 RON |
| Motor | Motor DC | 15 RON |
| MPU-6500 | Gyroscope/accelerometer | 20 RON |
Software
| Library | Description | Usage |
|---|---|---|
| embassy-rp | RP2040 HAL | Access to RP2040 hardware peripherals |
| embassy-net | Networking stack | TCP/IP, UDP, DHCP, DNS over Ethernet/Wi-Fi |
| embassy-executor | Async executor | Runs async tasks on embedded devices |
| embassy-sync | Async synchronization | Primitives like mutexes, channels |
| embassy-time | Time utilities | Delays, timeouts, timers |
| embassy-usb | USB stack | USB device support |
| embassy-usb-logger | USB logging | Logging over USB via defmt |
| cyw43 | Wi-Fi chip driver | Driver for CYW43 Wi-Fi chip |
| embedded-hal | HAL traits | Common embedded interfaces (SPI, I2C) |
| embedded-hal-async | Async HAL traits | Async SPI/I2C interfaces |